Наверное многие из хабражителей слышали о таком направлении исследований, как управление транспортными потоками. Над этой проблемой люди работают уже давно и, в результате, добились определенных успехов – адекватное моделированное городских транспортных потоков позволяет значительно облегчить работы по разгрузке городских дорог, снизить аварийность за счет оптимальной расстановки и настройки светофоров, определить оптимальные варианты устранения пробок на наиболее загруженных местах.
Однако, серьезно заниматься близкой к вышеупомянутой проблемой достоверного моделирования поведения пешеходных потоков ученые начали сравнительно недавно. В данной статье я постараюсь познакомить читателей с некоторыми существующими моделями пешеходных потоков, и рассказать об их свойствах и особенностях. Интерес к данной теме появился у исследователей в конце 80-х — начале 90-х годов XX века, после того, как в ходе изучения последствий катастроф, крушений, аварий были выявлены недостатки конструкции зданий, кораблей, приведшие к значительным человеческим жертвам. По стандартам, эти конструкции удовлетворяли требования проверок, но в условиях ЧС вскрылись неожиданные «бутылочные горлышки», приведшие к печальным последствиям. А ведь если можно было бы смоделировать человеческие потоки, перемещающиеся в рассматриваемой конструкции, и рассматривать их поведение, как в обыденных, так и в критических ситуациях – объект можно было бы доработать и сделать более безопасным ещё до строительства.
Главная проблема, возникающая при моделировании движения пешехода – сложность воссоздания правдоподобного поведения. Логично, что перемещаясь, я буду стремиться достичь точки назначения (а как? Максимально быстро? Неспешно прогуливаясь?), и стараясь не сталкиваться с другими пешеходами. Однако, в реальности я не столь редко встречаюсь с полностью алогичным (с моей точки зрения) поведением – внезапные остановки при оживленном движении, резкие развороты на месте, банальное «пру напролом»…
Можно выделить три различных уровня поведения пешехода
На уровне стратегии пешеход решает, каких целей он хочет добиться и в каком порядке он будет их выполнять. Тактический уровень отвечает за выбор краткосрочных решений – таких как выбор оптимального маршрута в соответствии с особенностями местности, интенсивности движения. Уровень операций описывает непосредственно движение пешехода, т.е. немедленные решения, необходимые, чтобы избежать столкновений и т.п.
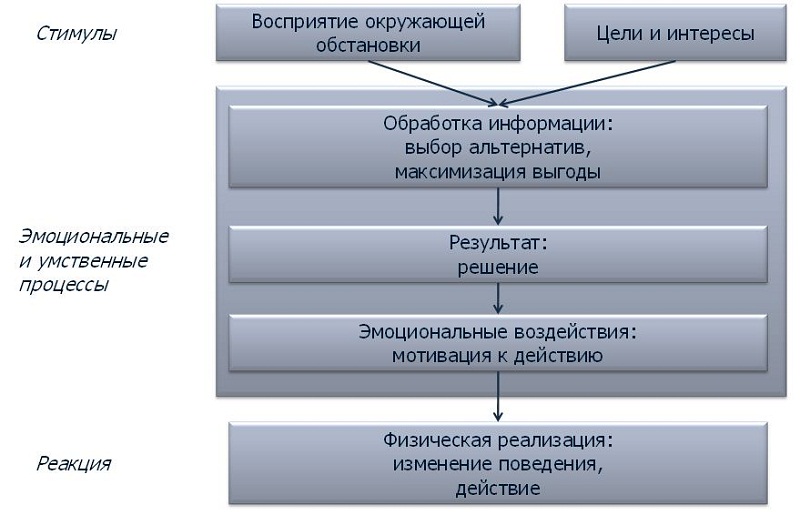
Схему принятия решения можно представить в следующем виде:
Для воссоздания правдоподобного поведения модели пешеходного потока необходима обработка большого массива информация из других дисциплин – социологии, психологии и др. Понимание этой информации предоставит возможность для работы с двумя верхними уровнями поведения пешехода. Для моделирования операционного уровня часто основываются на различных физических моделях, представляя человеческий поток, к примеру, как некое вещество, состоящее из крупных молекул или фигур на шахматном поле. Целью такого представления является найти такую модель, которая будет проста в реализации настолько, насколько это вообще возможно, но при этом она будет воспроизводить «реалистичное» поведение человеческого потока, которое будет близко к результатам эксперимента и может быть воспроизведено не один раз.
При выборе модели необходимо определить ряд параметров, которыми обладает модель:
• Выбор микроскопической или макроскопической модели. В представлении микроскопической модели можно выделить некоторое количество пешеходов, определить их характеристики, проследить их маршрут. В макроскопической модели нельзя выделить отдельного пешехода, основополагающими являются пешеходные потоки.
• Дискретная или непрерывная модель.
• Детерминированная или стохастическая модель. В детерминированной модели все возможные реакции определены и неизменны. В стохастической модели пешеход может по-разному реагировать на одну и ту же ситуацию.
• Модель, основанная на правилах, или основанная на силах. В модели, основанной на правилах, решение принимается на основе данных о текущей ситуации и целях пешехода. В модели, основанной на силах, пешеход «чувствует» силы действующие на него со стороны других пешеходов и со стороны инфраструктуры, решение принимается в зависимости от размера результирующей величины суммы сил, действующих на человека.
• Высокая или низкая точность. Характеризует «реализм» работы модели. Модель с высокой степенью точности будет стараться реализовать движение потока с максимально приближенными к реальности алгоритмами выбора решений, пути и т.п. Модель с низкой степенью точности может быть вовсе лишена какой бы то ни было интеллектуальности. Первый путь ведет к большей сложности модели, росту числа переменных и, вполне вероятно, увеличению времени ответа, т.к. будет обрабатываться большое число данных. Модель с более низкой точностью будет более легко реализовываться, быстрее работать, но необходимо учитывать, что точность её не будет идеальной.
Среди существующих моделей пешеходных потоков можно выделить:
• Модель притягивающихся сил: в ней пешеходы представлялись в виде электрических зарядов, находящихся в магнитном поле. Пешеходы и препятствия представляются как положительные заряды, а цели движения как отрицательные заряды;
• Модели, использующие теорию очередей для описания движения пешеходов с использованием вероятностных функций;
• Клеточные автоматы: в них всё пространство представляют собой сетку, в которой каждый пешеход может занимать только одну ячейку. Движение моделируется как перемещение людей между клетками по определенным правилам;
• Газо-кинетическая модель: здесь пешеходы представляются как молекулы в сжиженном газе. Точная скорость и положение пешеходов-молекул неизвестны, вместо этого известно статистическое распределение частиц, исходя из уравнения Больцмана;
• Модель социальных сил: использует Ньютоновскую механику для описания движения пешеходов. Силы порождаются социальными взаимодействиями;
• Расчетные модели: большая часть параметров разово рассчитывается на основании данных практического эксперимента, составляются таблицы зависимости этих параметров от числа пешеходов и размеров помещения. В дальнейшем эти данные используются для описания движения пешеходного потока.
Рассмотрим принципы работы данных моделей более подробно.
1. Модель притягивающихся сил (Magnetic force model)
Была разработана профессором С. Оказаки совместно с С. Матсушита в конце 1970-х годов. Является микроскопической непрерывной моделью. Согласно данной модели, каждый пешеход и препятствие несут положительный заряд. Отрицательный заряд сконцентрирован в том месте, куда стремятся пешеходы. Пешеходы движутся к цели и избегают столкновений. На каждого пешехода воздействуют две силы. Первая — магнитная сила, определённая в законе Кулона, которая зависит от величины электрического заряда пешехода и расстояния между пешеходом и целью его движения
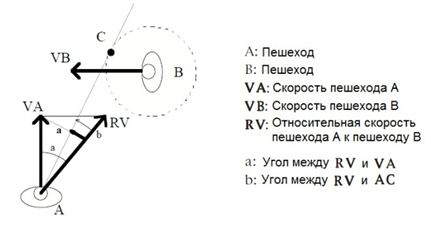
Вторая сила действует на пешеходов с целью предотвращения столкновений с другими пешеходами или препятствиями посредством использования ускорения.
На рис. 3 ускорения a воздействует на пешехода A с целью изменения вектора RV на направление линии AC. Линия AC является касательной, проведенной от пешехода A к окружности, очерченной вокруг пешехода B. Данная окружность представляет собой «зону личного пространства» и незнакомым людям нежелательно нарушать её границы. Её радиус зависит от культурных особенностей и в исследованиях С. Оказаки был принят радиус окружности в 60 сантиметров.
Достоинства модели:
• Простота реализации;
• Высокая скорость работы модели.
Недостатки модели:
• Невозможность индивидуализации пешехода (определение роста, веса и т.п.);
• Невозможность учета таких явлений как паника, хамство, чрезвычайные ситуации (когда поведение человека становится непредсказуемым);
• Нельзя задать иную линию поведения пешехода, кроме как стремления достичь цели и избежать столкновений с другими пешеходами или препятствиями.
2. Модель обслуживания очередей (Queueing model)
В теории организации очередей движение описано с точки зрения функций плотности вероятности. Пешеходы прибывают с определенной вероятностью в сервер, обслуживаются и встают в очередь. Три главных элемента в системе организации очередей — прибытие, обслуживающий механизм и организация очереди (то есть FIFO). Ласло Ловас предложил стохастическую модель, где пешеходный поток в здании может быть смоделирован как процесс организации сети очередей. В процессе, каждого пешехода рассматривают как единственный объект потока, который взаимодействует с другими объектами. Узлы в созданной сети очередей представляют собой комнаты, а связи рассматриваются как двери. В процессе движения человек выбирает новый узел согласно определенной вероятности, приводящей к новому уравнению, которое описывает изменение в количестве пешеходов со времени t к наступлению момента t+h. Из полученного уравнения можно оценить эффективность эвакуации людей из помещения (то есть ожидаемое оставшееся число людей в узле и ожидаемое число эвакуировавшихся людей).
3. Клеточные автоматы (Cellular automata model)
Клеточные автоматы являются простым и быстрым способом моделирования пешеходного потока. В клеточной модели автоматов всё пространство представляет собой сетку.
Каждая клетка сетки может быть занята одним единственным пешеходом. Движение смоделировано как изменение клеток, где несколько правил применены к автоматам (пешеходам). Эти наборы правил отличаются в различных реализациях данной модели. Некоторые реализации модели будут обсуждены далее.
Блю и Адлер выделили два элемента пешеходного движения: движение вперед и разрешение конфликтов. Движение вперед указывает на желание пешехода достигнуть определенной цели и сводится к определению скорости и ускорения каждого пешехода. Разрешение конфликтов означает желание избежать физического контакта.
Набор правил, предложенных Блю и Адлером, состоит из шести правил, которые применяются на четырех различных этапах. Первый этап применяет правила изменения маршрута. На втором этапе всем пешеходам назначается новая клетка. На третьем этапе правила продвижения применяются для каждого пешехода. На последнем этапе пешеходы скачкообразно перемещаются в новые клетки.
Изменение маршрута в этой модели регулируется пятью правилами. Изменение возможно, только если смежная клетка доступна и не занята пешеходом.
1. Определите, доступны ли клетки непосредственно справа и слева
2. Решение противоречиво, если смежная клетка доступна, но на эту клетку претендует два маршрута. На этом этапе рандомно определяют, какой пешеход получит доступ к клетке.
3. Завершите изменение маршрута, если обе смежных клетки недоступны.
4. Вычислите незанятое расстояние для активных и незанятых смежных маршрутов. Если расстояние уникально и максимально, присвойте пешехода этому маршруту. Это значит, что пешеход выберет путь, у которого нет никаких противоречий на максимально большом участке. Если никакое уникальное максимальное расстояние не найдено, присвойте маршрут согласно правилу пять.
5. Если три маршрута приводят к максимальному расстоянию, применяют разделение 80/10/10 для текущего маршрута и двух смежных маршрутов. Если два маршрута приводят к максимальному расстоянию, применяют разделение 50/50.
После определения маршрута пешеход перемещается по присвоенному ему маршруту. Это осуществляется на втором этапе. На третьем этапе пешеходам присваивается скорость перемещения. Во время этого этапа пешеходы могут поменяться местами с определенной вероятностью. Это может произойти, если два пешехода движутся друг на друга. На этапе четыре все пешеходы перемещаются.
Модель была применена к однонаправленным пешеходным аллеям и двунаправленному потоку, в котором число двигающихся в одном направлении пешеходов много больше пешеходов, двигающихся в обратном направлении.
Дейкстра, Йессурун и Тиммерманс предложили модель с фокусом на перемещение пешеходов в аллее. Во время перемещения пешехода выделены четыре шага:
1. Проверьте, передал ли пешеход решение (конец действия или узел базовой сети). Если это — истина, переходите к шагу три. В противном случае переходите на шаг два.
2. Если пешеход находится в ячейке решения (узел сети), исследуйте поведение пешехода и поверните пешехода в требуемом направлении. Таким образом, решение будет принято.
3. Если новая выбранная ячейка пуста, переместите пешехода в ячейку. В противном случае переходите к шагу четыре.
4. Если ячейка слева или справа не занята, переместитесь налево или направо.
В этой модели перемещение направлено к цели и изменено только в моментах принятия решения. Взаимодействие с другими пешеходами не рассматривалось.
Янг Лижонг и др. разработали модель клеточных автоматов для пожарной эвакуации. Они представили специальные правила для расчета маршрута при пожаре (степень опасности). Эта степень опасности состоит из степени опасности позиции (определенной расстоянием до самого близкого выхода) и степени опасности возгорания (определенной расстоянием до огня). В их модели определены три этапа.
1. Каждый пешеход выбирает ячейку с самой маленькой степенью опасности, относительно его собственного представления. Если все смежные ячейки — заняты или имеют более высокую степень опасности, житель не перемещается.
2. Если больше чем один житель хочет переместиться в ту же самую ячейку, один из желающих выбирается случайным образом. Остальные на этом этапе должны ожидать.
3. Каждый житель обновляет степень опасности.
4. Газокинетическая модель (Gas-kinetic model)
У пешеходной динамики есть некоторые очевидные общие черты с жидкостями. Например, движение вокруг препятствий очень похоже на «обтекание» жидкостью препятствия. Движение в промежуточной плотности ограничено (кратковременные корреляции). Поэтому не удивительно, что, как и для транспортной динамики, самые ранние модели пешеходной динамики взяли вдохновение от гидродинамики или газокинетической теории. Обычно эти макроскопические модели детерминированы, основаны на взаимодействии сил и являются моделями низкой точности.
Хендерсон, попытался провести аналогию между большими скоплениями людей и классическим газом. В результате отслеживания движения в различных толпах при условии низкой плотности («газообразности») он нашел соответствие функций распределения скорости с распределением Максвелла-Больцмана.
Воодушевившись этим наблюдением, он позже разработал жидко-динамическую теорию пешеходного потока. При описании взаимодействий между пешеходами как череды столкновений, в которых частицы обмениваются импульсами и энергией, гомогенная толпа, может быть описана кинетической теорией газов. Однако, интерпретация количеств не является полностью четкой. К примеру, аналоги давления и температуры находятся в контексте пешеходного движения. Температура может быть соотнесена со скоростным различием, которое связано с распределением требуемых скоростей, тогда как давление выражает требование переместиться против силы в определенное направление.
У газокинетических моделей имеются проблемы при низкой плотности пешеходного потока, что является общем проблемой для всех макроскопических моделей.
5. Модель социальных сил (Social force model)
Модель социальных сил была разработана Хелбингом и Молнаром. В этой модели различные побуждения и влияния пешехода описаны различными видами силы. Эта модель основывается, главным образом, на Ньютоновской динамике, но масса равна 1. Это приводит к модулю для сил. Эта модель в состоянии воссоздать несколько природных явлений, которые происходят во время пешеходного перемещения:
1. Пешеходы обычно выбирают самый быстрый маршрут;
2. Пешеходы перемещаются с индивидуальной скоростью, принимая во внимание ситуацию, пол, возраст, окружающую среду, и т.д. Скорость представляет собой Гауссово распределение.
Рассмотрим силы и параметры, используемые в данной модели (приведу описание без математического аппарата, т.к. статья все же больше обзорная):
1) Самая очевидная сила — так называемая движущая сила, которая отражает побуждение пешехода, чтобы переместиться к цели с требуемой скоростью.
2) Самое важное взаимодействие между пешеходами — стремление сохранить определенное расстояние до других пешеходов. Чтобы описать это поведение, в модели социальных сил реализовано отталкивание. Отталкивание — зависимо от расстояния между пешеходами — оно имеет самое высокое значение на близком расстоянии (но не вне максимального предела) и стремится к нулю с увеличением расстояния между пешеходами. Это может быть реализовано, с использованием показательной функции, приводя к силе, описывающей взаимодействия между пешеходами.
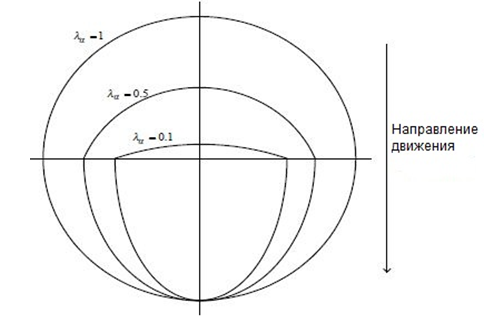
3) Обычно пешеходное перемещение является анизотропным. Это означает, что действия перед пешеходом более важны чем действия, происходящие позади него. У людей есть возможность предвидеть действия других людей, и таким образом они могут реагировать на действия, предпринятые другими людьми. Чтобы реализовать это в модели социальных сил, действия, происходящие в поле зрения пешехода, должны иметь большую степень влияния, чем действия пешеходов производимые все поля зрения. Чтобы описать подобное поведение, форм-фактор поля зрения реализован так, что он зависит от угла между требуемым направлением перемещения и направлением пешехода, проявляющего отталкивающую силу.
Если лямбда меньше 1, то пешеходное движение может рассматриваться как анизотропное — пешеходы будут неодинаково реагировать на объекты. Объекты впереди оказывают большее влияние на поведение, чем боковые или находящиеся позади пешехода.
4) Сила трения скольжения является результатом того, что пешеходы пытаются избежать столкновения с другими пешеходами, которые движутся с высокой скоростью на маленьких расстояниях.
5) Аттракторы могут влиять на поведение пешеходов. Окна или специальные аттракторы например могут привлечь пешехода, и он переместится к аттрактору, а некоторые (пожар, предупредительная табличка) — отпугнуть. Привлекательность аттрактора зависима от времени и линейно уменьшается к нулю. Аттракторы могут быть смоделированы таким же образом, как и социальная сила между пешеходами
6) Пешеходы часто ходят в группах. После того, как они разделяются (например, если пешеходы должен избежать столкновения с препятствием), отдельные пешеходы пытаются снова преобразовать группу. Это осуществляется под воздействием силы притяжения, действующей от пешехода А к пешеходу Б.
7) Всем пешеходам присуще индивидуальное поведение, и таким образом их перемещение может отличаться от принятых законов. Это поведение представлено колебанием. Колебания нормально распределены и перпендикулярны вектору, указывающему на требуемое направление.
Модель социальных сил состоит из большого количества сил, которые представляют различные влияния, воздействующие на пешехода в реальности. Сумма всех сил описывает перемещение и направление пешехода.
В зависимости от моделируемого случая все силы не обязательно должны рассматриваться (например, физической силой можно пренебречь, если никакой процесс паники или эвакуации не моделируется).
К слову, именно модель социальных сил используется для моделирования пешеходных потоков в PTV VISION VISSIM.
6. Расчетные модели
Использование расчетных моделей предполагает проведенение масштабного эксперимента с участием большого количества людей, с целью выявления закономерностей изменения параметров пешеходного потока (его скорость, плотность и т.п.) в зависимости от окружающих условий.
В России, так скажем, для «официального моделирования» можно использовать ГОСТ 12.1.004-91 «Пожарная безопасность. Общие требования», который основывается на расчетном методе с представлением пешеходного потока подобно тому, как это сделано в газо-кинетической модели. Этот ГОСТ даёт только приблизительное представление об эффективности планировки конфигурации.
ГОСТ 12.1.004-91 имеет множество недостатков, таких как:
• Большая зависимость от предопределенных величин (рассматривается только 3 варианта средней плотности горизонтальной проекции человека – взрослый, взрослый в зимней одежде, подросток;
• Не учитывается тот факт, что телосложение у людей может различаться крайне сильно;
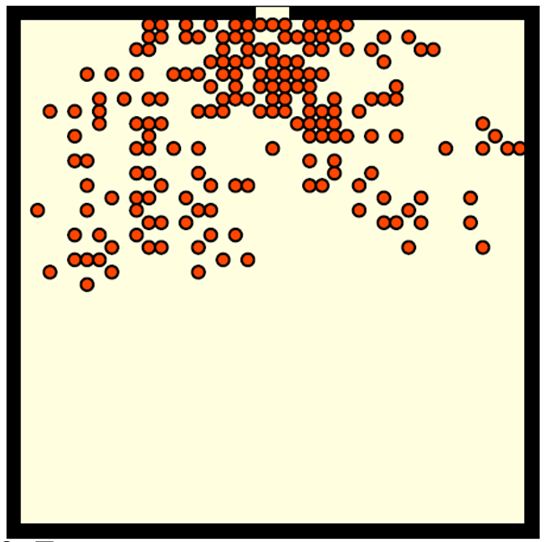
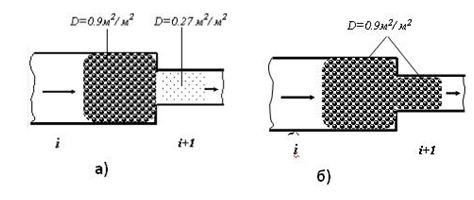
• Низкая точность моделирования (например, не учитывается разуплотнение человеческого потока, см. рисунок ниже);
• Направленность только на пожарную безопасность.
Где а) реальное разуплотнение пешеходного потока, а б) по ГОСТ 12.1.004-91.
----------------------------
На этом я бы хотел закончить данную статью. Данная тематика достаточно большая и интересная, а математики я не касался в ней сознательно. Статья распухла бы, как минимум, в полтора раза, а для вводной статьи и текущая версия вышла достаточно объемной. На данный момент, публикаций на русском языке, посвященных данной теме практически нет, и если моя статья пробудит интерес — то я буду этому только рад.
 АДМИНКА
АДМИНКА НАВИГАЦИЯ
НАВИГАЦИЯ СВЯЗЬ С НАМИ
СВЯЗЬ С НАМИ РАДИО
РАДИО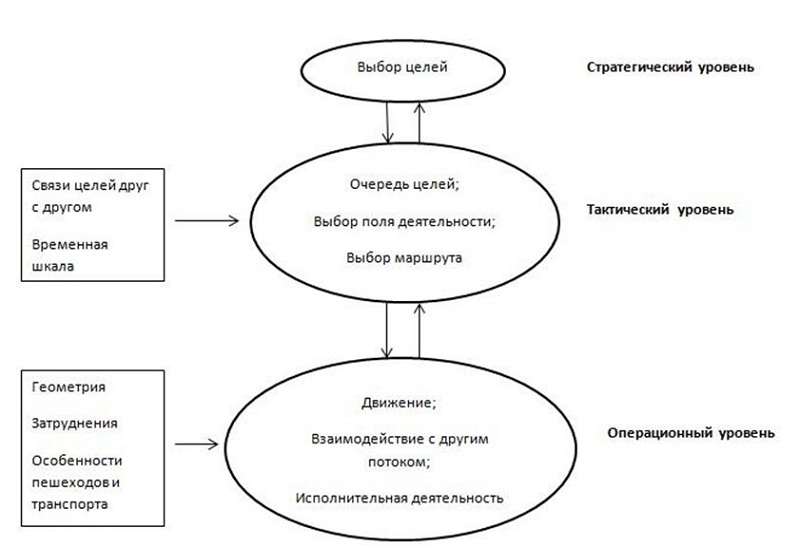
 ЛУЧШИЕ ЧАТЫ
ЛУЧШИЕ ЧАТЫ


 СЧЁТЧИКИ
СЧЁТЧИКИ